안녕하세요. 오랜만에 인사드립니다.
거의 2년만에 게시글이네요ㅎㅎ..
그간 너무 게을렀던 저를 탓하며
앞으로는 자주 CREO와 인벤터,
시험과 관련된 정보들을 포스팅하겠습니다.
아무쪼록 봐주셔서 감사합니다.
오랜만에 들고온 주제는 바로 유성기어 어셈블리입니다.
얼마전 댓글에도 질문으로 달렸던 내용입니다.
기어 모델링은 이전 포스팅과 파트 파일 첨부로 대신하겠습니다.
[creo 3.0] 24 - 메커니즘 : 기어
안녕하세요 이번 포스팅에서는 아래 같이 메커니즘을 이용해서 기어를 한번 구현해보겠습니다. 핀구속으로 기어 두개를 어셈블리를하면 메커니즘을 주기전까지는 각각 따로 움직이게 됩니다. 그래서 기어 메커니..
zoomsuk.tistory.com
샘플 파일 다운로드
기어들은 최대한 규격에 맞게 모델링하려고했으나
지식이 부족해서 정확하지 않습니다..
하지만 메커니즘 구동에는 전혀 문제가 되지 않으니
양해 부탁드립니다.
우선 영상 먼저 보겠습니다.
사실 기어 메커니즘에서 크게 벗어나는 것은 없습니다.
중요한 부분만 세부 설명을 좀 드리자면

링크를 먼저 핀구속을 시켜야하기때문에
기준이되는 축을 먼저 생성해주어야 합니다.
모델-기준-축을 클릭하고
CTRL을 누른 채로 두개 평면을 선택하면 축이 생성됩니다.


핀구속 할때 축을 선택하지않고 원통면을 선택한 이유는
축을 선택하면 1번에서 만든 기준 축이 선택이 됩니다.
따라서 원통면을 선택하는 것이 정신건강에 좋습니다.


2번에서 링크를 핀구속을 했기 때문에
고정을 추가 해줍니다.
(지금 보니 그냥 애초에 고정 구속을 줬어도 되었겠네요..)
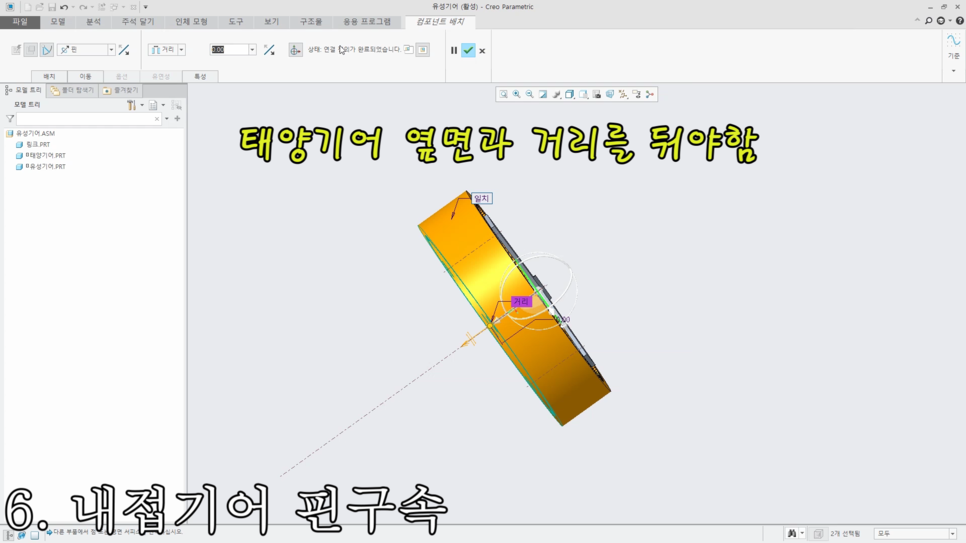
내접기어와 태양기어의 옆면은 절대 동일 평면상에 있으면 안됩니다.
나중에 기어 구속을 줄때 축선택 하기가 굉장히 어려워집니다.
저는 2.5mm정도 이격을 주었습니다.
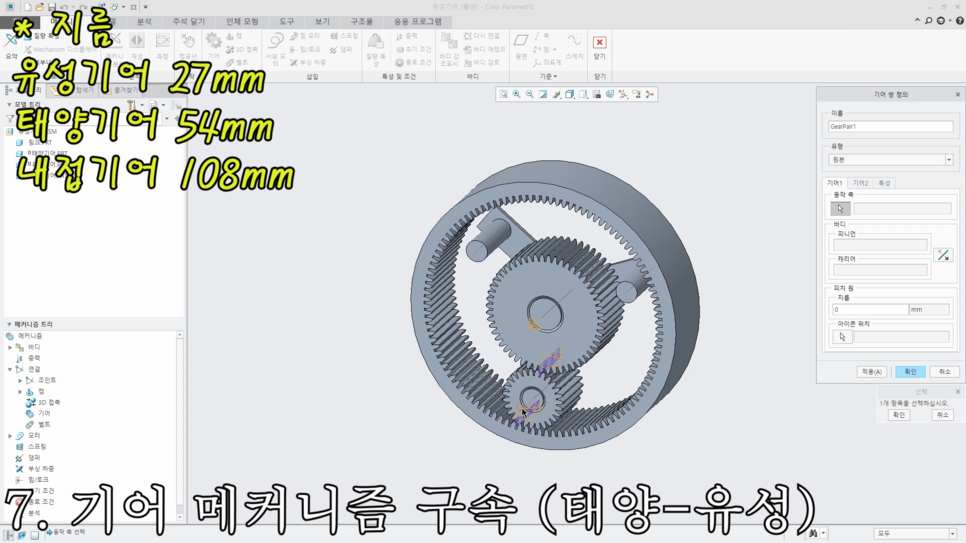
기어 구속할 때 각각의 기어에 맞는 지름을 입력합니다.

내접기어의 방향에 유의해야 합니다.
태양기어와 반대로 돌아야하기때문에
사진에 표시된 대로 방향을 바꿔줍니다.
오랜만에 포스팅이라 잘 되었는지 모르겠습니다.
궁금하신 것은 언제든지 물어보세요
댓글, 쪽지, 메일 최대한 빠르게 보고 답변드리겠습니다.
일주일내로 새로운 포스팅을 들고 찾아오겠습니다.
감사합니다.
'Engineering > PTC Creo' 카테고리의 다른 글
| [PTC creo] 39 - 링크 메커니즘 (엔진, 직선왕복운동) (4) | 2020.02.18 |
|---|---|
| [PTC creo] 38 - 널링 (Knurling) (0) | 2020.02.11 |
| [creo 3.0] 36 - 서피스 모델링 기초, 경계 블렌드 기능 (4) | 2018.08.25 |
| [creo 3.0] 35 - 스윕(밴딩) 형상 길이 측정 (3) | 2018.03.26 |
| [creo 3.0] 34 - 시뮬레이트(Simulate) (2) | 2018.02.10 |



